Przyspieszenie
| ||
| Rodzaj wielkości | wektorowa | |
| Symbol | a→{displaystyle {vec {a}}}  , a{displaystyle mathbf {a} } , a{displaystyle mathbf {a} } , a{displaystyle a} , a{displaystyle a} | |
Jednostka SI | m/s2, m·s-2 | |
| W podstawowych jednostkach SI | ms2{displaystyle mathrm {frac {m}{s^{2}}} }  | |
Wymiar | LT2{displaystyle mathrm {frac {L}{T^{2}}} }  | |
Przyspieszenie – wektorowa wielkość fizyczna wyrażająca zmianę wektora prędkości w czasie.
Przyspieszenie definiuje się jako pochodną prędkości po czasie, czyli jest szybkością zmiany prędkości. Jeśli przyspieszenie styczne jest skierowane przeciwnie do zwrotu prędkości ruchu, to wartość prędkości w tym ruchu maleje a przyspieszenie to jest nazywane opóźnieniem.
Spis treści
1 Definicja
2 Związek z dynamiką
3 W ruchu prostoliniowym
3.1 W ruchu jednostajnie zmiennym
4 Przyspieszenie w ruchu krzywoliniowym
4.1 Przyspieszenie dośrodkowe (normalne)
4.2 Przyspieszenie styczne
5 Przyspieszenie kątowe
6 Przyspieszenie układu ciał
7 Pomiar
8 Zobacz też
Definicja |

Definicja przyspieszenia
Jeżeli dany wektor r→{displaystyle {vec {r}}}

- a→=dv→dt{displaystyle {vec {a}}={frac {d{vec {v}}}{dt}}}
- a→=dv→dt{displaystyle {vec {a}}={frac {d{vec {v}}}{dt}}}

Ponieważ prędkość jest pochodną położenia po czasie, to przyspieszenie można zapisać jako drugą pochodną położenia po czasie:
- a→=d2r→dt2{displaystyle {vec {a}}={frac {d^{2}{vec {r}}}{dt^{2}}},}
- a→=d2r→dt2{displaystyle {vec {a}}={frac {d^{2}{vec {r}}}{dt^{2}}},}

Jednostką przyspieszenia w układzie SI jest metr na sekundę do kwadratu.
- [a→]=ms2{displaystyle left[{vec {a}}right]={frac {text{m}}{{text{s}}^{2}}}}
- [a→]=ms2{displaystyle left[{vec {a}}right]={frac {text{m}}{{text{s}}^{2}}}}
![{displaystyle left[{vec {a}}right]={frac {text{m}}{{text{s}}^{2}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/069862d0b908e548722f4109ed5b2131b24746b3)
Związek z dynamiką |
Zgodnie z drugą zasadą dynamiki przyspieszenie ciała jest proporcjonalne do wypadkowej siły F działającej na to ciało i odwrotnie proporcjonalne do masy ciała m. Kierunek i zwrot przyspieszenia pokrywa się z kierunkiem i zwrotem siły. Wzór wyrażający tę zależność ma postać
- a→=F→m{displaystyle {vec {a}}={frac {vec {F}}{m}}}
- a→=F→m{displaystyle {vec {a}}={frac {vec {F}}{m}}}

W ruchu prostoliniowym |
W ruchu po linii prostej kierunek prędkości jest ustalony, więc można ją traktować tak jak wielkość skalarną. Wówczas przyspieszenie określa wzór:
- a=dvdt{displaystyle a={frac {dv}{dt}}}
- a=dvdt{displaystyle a={frac {dv}{dt}}}

W ruchu jednostajnie zmiennym |
Gdy przyspieszenie jest stałe, wzór definicyjny przybiera postać
- a=ΔvΔt{displaystyle a={frac {Delta v}{Delta t}}}
- a=ΔvΔt{displaystyle a={frac {Delta v}{Delta t}}}

gdzie Δv jest przyrostem prędkości w czasie Δt.
Przyspieszenie w ruchu krzywoliniowym |
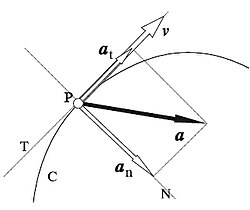
Przyspieszenie styczne at i normalne an
Jeżeli ciało porusza się po torze krzywoliniowym, wówczas całkowite przyspieszenie może być rozłożone na dwie składowe: prostopadłą do toru ruchu zwaną przyspieszeniem dośrodkowym lub normalnym (oznaczanym a→n{displaystyle {vec {a}}_{n}}

Wektor przyspieszenia całkowitego jest sumą składowej normalnej i stycznej:
- a→=a→n+a→t{displaystyle {vec {a}}={vec {a}}_{n}+{vec {a}}_{t}}

Składowe styczna i normalna są prostopadłe, dlatego wartość przyspieszenia całkowitego jest równa:
- |a→|=|a→n|2+|a→t|2{displaystyle |{vec {a}}|={sqrt {|{vec {a}}_{n}|^{2}+|{vec {a}}_{t}|^{2}}}}

Przyspieszenie dośrodkowe (normalne) |
Jest to składowa przyspieszenia prostopadła do toru ruchu. Reprezentuje tę część przyspieszenia, która wpływa na zmianę kierunku prędkości, a zatem na kształt toru, ale nie wpływa na zmianę wartości prędkości. Jeżeli prędkość chwilowa oznaczona jest jako v, a chwilowy promień zakrzywienia toru (promień okręgu stycznego do toru, czyli promień krzywizny toru) ruchu wynosi r, to wartość an przyspieszenia dośrodkowego ciała jest równa:
- an=v2r{displaystyle a_{n}={frac {v^{2}}{r}}}

Przyspieszenie styczne |
Jest to składowa przyspieszenia styczna do toru ruchu, powodująca zmianę wartości prędkości, ale nie powodująca zmiany kierunku ruchu. Stosując oznaczenie v{displaystyle v}
- at=dvdt=d2sdt2{displaystyle a_{t}={frac {dv}{dt}}={frac {d^{2}s}{dt^{2}}}}

Przyspieszenie kątowe |
Przyspieszenie kątowe jest wielkością opisującą ruch krzywoliniowy utworzoną analogicznie do przyspieszenia, tylko wyrażoną w wielkościach kątowych. Jest pseudowektorem leżącym na osi obrotu i skierowanym zgodnie z regułą śruby prawoskrętnej. Jeśli współrzędną kątową ciała określa kąt α, a ω oznacza prędkość kątową, to wartość przyspieszenia kątowego ε określa wzór
- ε=dωdt=d2αdt2[ε]=1s2{displaystyle varepsilon ={frac {domega }{dt}}={frac {d^{2}alpha }{dt^{2}}}quad left[varepsilon right]={frac {1}{{text{s}}^{2}}}}
![{displaystyle varepsilon ={frac {domega }{dt}}={frac {d^{2}alpha }{dt^{2}}}quad left[varepsilon right]={frac {1}{{text{s}}^{2}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6cf915c0ab0c118fbcca22433492d8afc120446a)
Jednostką przyspieszenia kątowego w układzie SI jest jeden radian przez sekundę do kwadratu.
Przyspieszenie układu ciał |
Poniżej przedstawiono sposób obliczenia przyspieszenia przykładowego układu ciał.
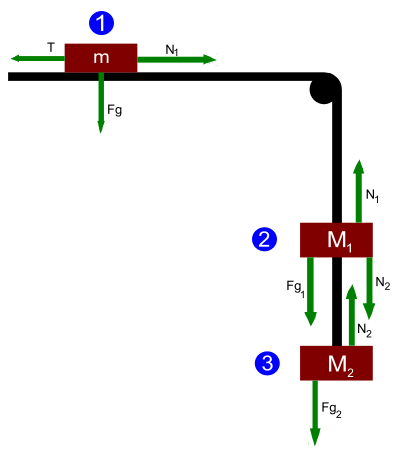
Aby wyznaczyć przyspieszenie poruszającego się układu ciał, należy sporządzić rysunek pomocniczy. Na rysunku rysujemy symbolicznie 3 ciała oraz działające na nie siły. Następnie należy ułożyć równanie siły wypadkowej dla każdego z ciał, bierzemy pod uwagę siły działające w kierunku ruchu ciała. Dla każdego ciała należy zapisać osobne równanie II zasady dynamiki.
Dla pierwszego ciała o masie m siła wypadkowa wynosi
Od naciągu odejmujemy tarcie, ponieważ ciało porusza się w prawą stronę i naciąg jest większy od tarcia.
Fw=N1−T{displaystyle F_{w}=N_{1}-T}

Zgodnie z II zasadą dynamiki siła wypadkowa równa się iloczynowi masy i przyspieszenia, a tarcie równa się iloczynowi masy, przyspieszenia ziemskiego i współczynnika tarcia. Zatem:
m⋅aw=N1−mgf{displaystyle mcdot a_{w}=N_{1}-mgf}
Kolejnym krokiem jest ułożenie równania siły wypadkowej dla ciała o masie M1. Ciężar ciała i naciąg 2 są większe od naciągu 1, zatem równanie ma postać:
Fw=Fg1+N2−N1{displaystyle F_{w}=Fg_{1}+N_{2}-N_{1}}

Zgodnie z II zasadą dynamiki siła wypadkowa równa się iloczynowi masy i przyspieszenia, a ciężar ciała równa się iloczynowi masy i stałej grawitacji. Zatem:
M1⋅aw=M1⋅g+N2−N1{displaystyle M_{1}cdot a_{w}=M_{1}cdot g+N_{2}-N_{1}}
Przy okazji wyprowadzamy wzór na naciąg, który przyda się do dalszych obliczeń.
N1=M1⋅g+N2−M1⋅aw{displaystyle N_{1}=M_{1}cdot g+N_{2}-M_{1}cdot a_{w}}

W końcu układamy wzór na siłę wypadkową dla ciała o masie M2
Fw=Fg2−N2{displaystyle F_{w}=Fg_{2}-N_{2}}

Zgodnie z II zasadą dynamiki siła wypadkowa równa się iloczynowi masy i przyspieszenia, a ciężar ciała równa się iloczynowi masy i stałej grawitacji. Zatem:
M2⋅aw=M2⋅g−N2{displaystyle M_{2}cdot a_{w}=M_{2}cdot g-N_{2}}

Wyprowadzamy wzór na naciąg 2.
N2=M2⋅g−M2⋅aw{displaystyle N_{2}=M_{2}cdot g-M_{2}cdot a_{w}}

Następnie do wzoru na naciąg 1 podstawiamy w miejsce N2 wzór na naciąg 2
N1=M1⋅g+M2⋅g−M2⋅aw−M1⋅aw{displaystyle N_{1}=M_{1}cdot g+M_{2}cdot g-M_{2}cdot a_{w}-M_{1}cdot a_{w}}

Teraz za naciąg 1 podstawiamy m⋅aw=N1−mgf{displaystyle mcdot a_{w}=N_{1}-mgf}

m⋅aw=M1⋅g+M2⋅g−M2⋅aw−M1⋅aw−mgf{displaystyle mcdot a_{w}=M_{1}cdot g+M_{2}cdot g-M_{2}cdot a_{w}-M_{1}cdot a_{w}-mgf}

Kolejnym krokiem jest uporządkowanie równań, wyrażenia z przyspieszeniem przenosimy na lewo, a wyrazy z przyspieszeniem ziemskim na prawo
m⋅aw+M1⋅aw+M2⋅aw=M1⋅g+M2⋅g−mgf{displaystyle mcdot a_{w}+M_{1}cdot a_{w}+M_{2}cdot a_{w}=M_{1}cdot g+M_{2}cdot g-mgf}

Po lewej stronie równania wyciągamy przed nawias przyspieszenie wypadkowe, po prawej stronie podobnie postępujemy z przyspieszeniem ziemskim
aw(m+M1+M2)=g(M1+M2−mf){displaystyle a_{w}(m+M_{1}+M_{2})=g(M_{1}+M_{2}-mf)}

Następnie dzielimy równanie obustronnie przez (m+M1+M2){displaystyle (m+M_{1}+M_{2})}
aw=g(M1+M2−mf)m+M1+M2{displaystyle a_{w}={frac {g(M_{1}+M_{2}-mf)}{m+M_{1}+M_{2}}}}

Pomiar |
Do pomiaru służy przetwornik przyspieszenia nazywany przyspieszeniomierzem lub akceleromierzem czy akcelerometrem.
Zobacz też |
zryw – zmiana przyspieszenia w czasie- przyspieszenie dośrodkowe
- przyspieszenie ziemskie
- przyspieszenie grawitacyjne
- grawitacja
| |||||||||||||||||||